

有了GPT-4之后,机器人把转
来源:新智元
今天,Meta重磅发布了Habitat 3.0,经它训练的AI智能体,学会了找人,还能帮人打扫房间。社交智能机器人,进入下一个里程碑!
今天开始,人类离帮忙做家务的机器人,又近了一步!

Meta宣布推出Habitat 3.0,目的是开发出社会化的AI智能体,这意味着社交智能机器人已经进入新的里程碑阶段。
这些具身智能背后的关键,当然就是AI Agent。有了它们,机器人可以和人类协作,帮人类完成日常任务。
论文地址:https://ai.meta.com/static-resource/habitat3
项目地址:https://github.com/facebookresearch/habitat-lab/tree/v0.3.0
其实,Meta在今天同时宣布了三项重大进展——
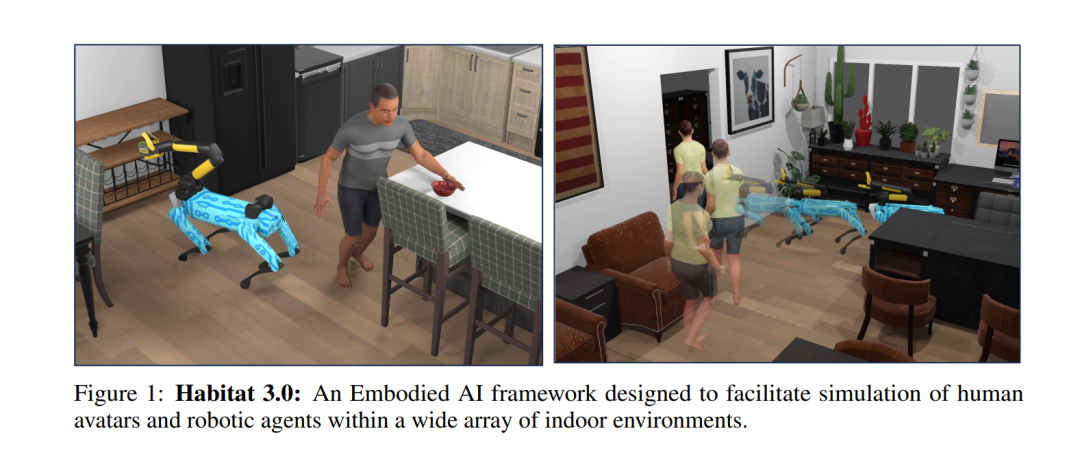
1. Habitat 3.0是第一个支持在多样化、逼真的室内环境中,就人机交互任务进行大规模训练的模拟器。
它能同时支持机器人和人形化身,让人类和机器人在家庭环境中协作,比如帮忙打扫房间。
2. Habitat合成场景数据集(HSSD-200),是由艺术家创造的三维数据集,包含211个场景中466个语义类别的18,000多个对象。
HSSD-200在同类数据集中质量最高,可以训练导航智能体,对物理世界三维重建场景的泛化效果非常好,使用的场景数量也要少两个数量级。
3. HomeRobot则是一个家用机器人助手硬件和软件平台,非常经济实惠,机器人可以在模拟和物理世界环境中,执行开放的词汇任务。
在大规模学习上,Habitat 3.0在单GPU上每秒可以完成超过1000步。

网友:能干家务的机器人什么时候出来
网友们表示:这是机器人技术的重大飞跃。

还有人感慨:这是非常高级的模拟人生游戏。

已经有人期待在Meta Quest VR中体验 Habitat 3.0了。

Dream一下,家政辅助机器人应该不远了。

Habitat 3.0
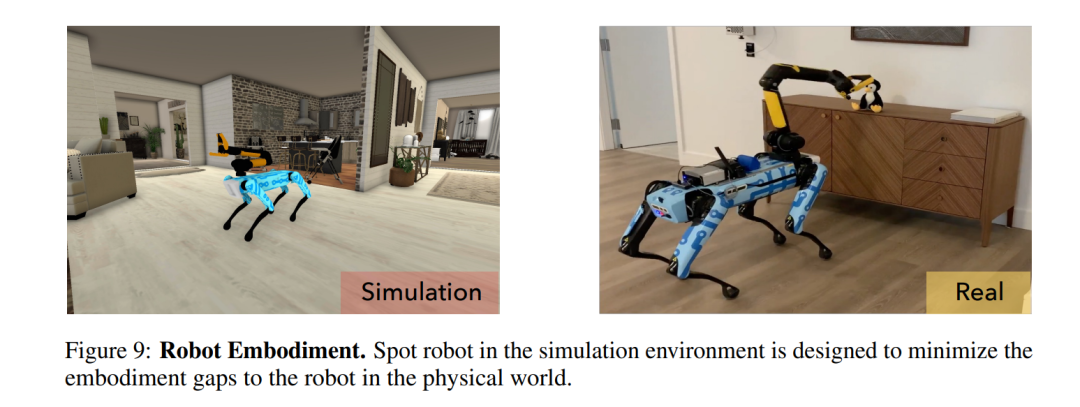
利用Habitat 3.0,Meta不仅在外貌和姿势上对人类进行了真实的模拟。

而且,还支持从简单(如行走和挥手)到复杂(如与物体交互)等各种类型的动作,并兼容动捕。
此外,虚拟化身还可以通过程序进行控制,并且不会出现性能下降——人-机模拟速度跟机器人-机器人模拟速度类似。

人在回路
Habitat 3.0的另一个关键特征,就是「人在回路」了。
通过鼠标、键盘或VR,我们可以实现效果惊人的人机交互控制。
完成任务后,系统会收集机器人的策略和数据,并进行人机交互的评估。
社交任务
此外,Habitat 3.0还可以模拟多种真实的社交场景。
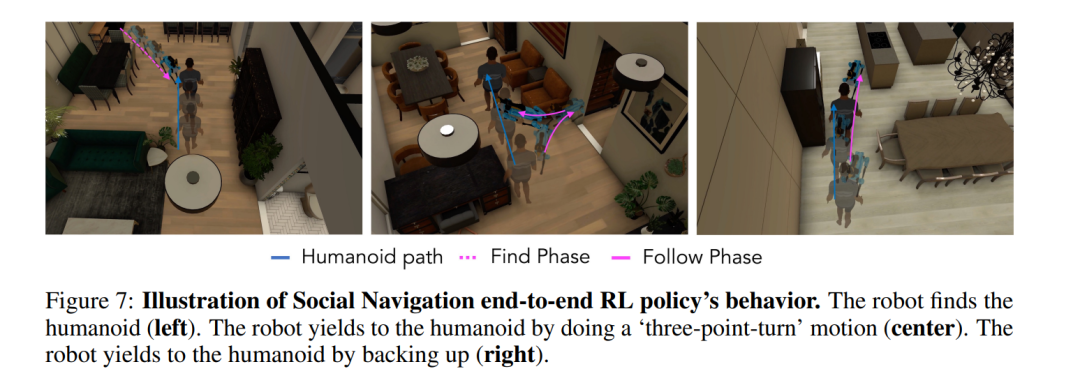
比如在被称为社交导航的任务中,机器人需要在保持安全的同时找到并跟随人类。

在另一项任务中,机器人需要和人类共同协作,完成诸如整理房间的任务。
这时人和机器人需要分别走到目标位置,其中,机器人需要想办法尽可能高效地和人类共同实现这一目标。

经过训练的机器人,可以实现各种社会行为!
除了能和人类保持安全距离外,机器人还会在必要时自己后退,给人类留出走路的空间。
让AI智能体在真实世界和人类互动
以往,当我们想到AI助手时,想到的通常是基于网络的聊天机器人,或者智能扬声器。
而Meta的研究者们一直希望实现具备通用智能的具身AI Agent,让它们可以感知环境,在数字和物理世界中和人类沟通、帮助人类。
其中一个愿景,就是做出全天可穿戴的AR头显,供人类使用。
另外,研究者们还在改进社交智能机器人背后的技术,让它们帮人类干家务,还能适应人类对于伴侣要求的个性化偏好。
工作主要集中在深入研究嵌入式系统,让下一代的AR和VR体验更佳。
不过,在物理硬件(无论是机器人还是AR眼镜)上与真人一起训练和测试具身AI智能体,会有一些可扩展性限制,还可能存在安全问题。
这就需要建立标准化的基准程序。
因此,Meta的研究者们开发了一套新工具,用于跨模拟器、数据集的机器人研究。
他们还开发了一个包含软硬件的技术堆栈,让这方面的研究更容易,也更实惠。
为了快速提高机器人能力,研究者在模拟器中开发和测试新的算法和模型,然后移植到实体机器人上。
几年以来,Habitat模拟器取得了许多显著的进步。
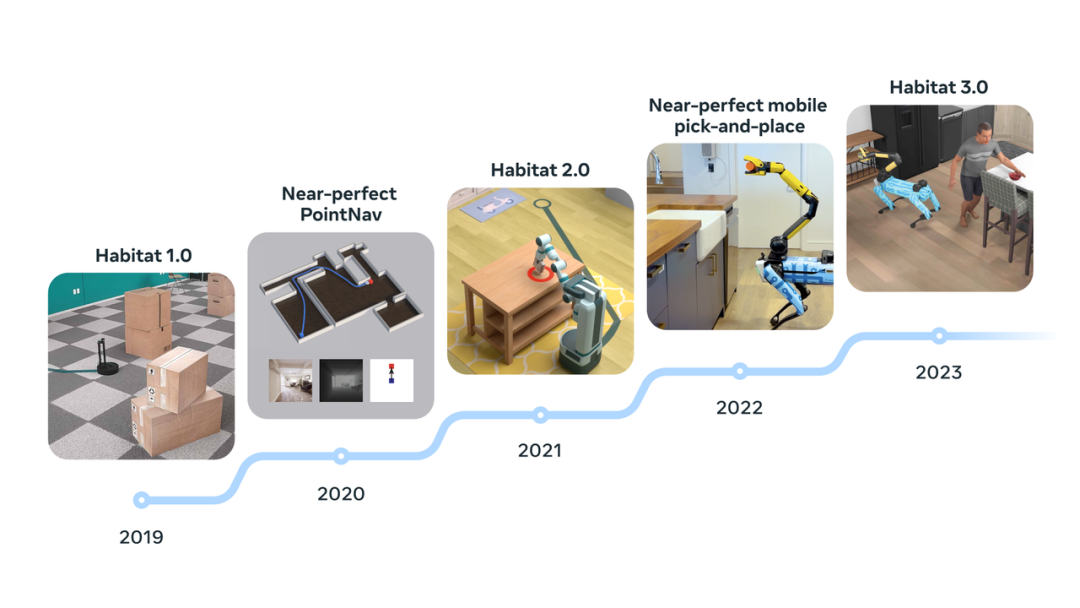
在Habitat 1.0训练的虚拟机器人,能以每秒超过10,000步(SPS)的速度,在物理世界房屋的三维扫描中导航。
Habitat 2.0 引入了交互式环境(例如,可拿起的物品、可打开的抽屉),并训练虚拟机器人通过重新排列物品来清理房屋。
Habitat 3.0在此基础更进一步,能够同时支持机器人和人形化身,实现人机协作完成日常任务,比如整理客厅、在厨房准备食谱。
这就开辟了新途径,研究人类与机器人在多样化、逼真、视觉和语义丰富的任务中的协作。
免责声明:数字资产交易涉及重大风险,本资料不应作为投资决策依据,亦不应被解释为从事投资交易的建议。请确保充分了解所涉及的风险并谨慎投资。OKEx学院仅提供信息参考,不构成任何投资建议,用户一切投资行为与本站无关。

和全球数字资产投资者交流讨论
扫码加入OKEx社群
industry-frontier

